mti-300car4p8h跑车数据
Mti-300跑车4.8h数据
Mti-300跑车,采样频率100Hz,总采集时间约为4.8小时。包含MEMS陀螺仪、加速度计、三轴地磁,以及mti输出的姿态方位数据,可作为航姿算法对比验证使用。Allan方差分析陀螺精度约10°/h。

数据读取的Matlab/PSINS Toolbox程序:
glvs
ts = 0.01;
% PacketCounter Acc_X Acc_Y Acc_Z Gyr_X Gyr_Y Gyr_Z Mag_X Mag_Y Mag_Z Roll Pitch Yaw
load mti-300car4p8h.mat; dd = double(ddf);
avarimu(adddt(datacut(imu,14500,17380)));
imu = [[dd(:,5:7), dd(:,2:4)]*ts, cnt2t(dd(:,1),ts)]; imuplot(imu);
mag = [dd(:,8:10),imu(:,end)]; magplot(mag);
att = [dd(:,[12,11,13])*glv.deg, imu(:,end)]; attplot(att);
作图结果如下:
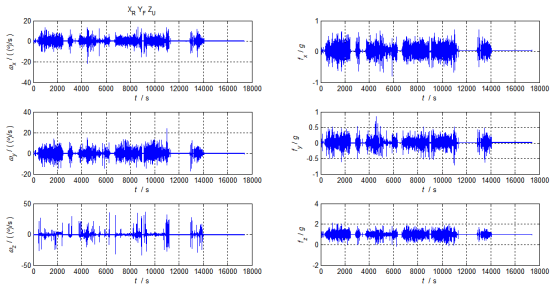
图1 MEMS-IMU原始数据图
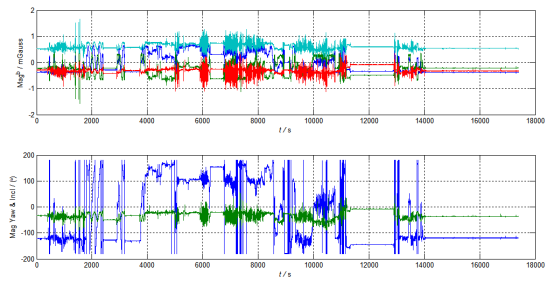
图2 三轴地磁数据
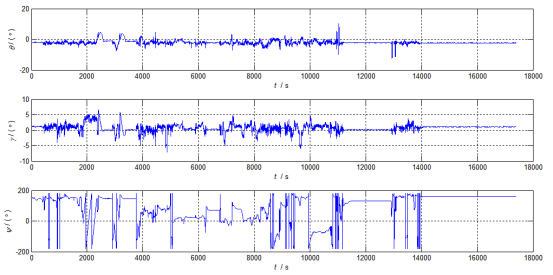
图3 mti姿态航向输出
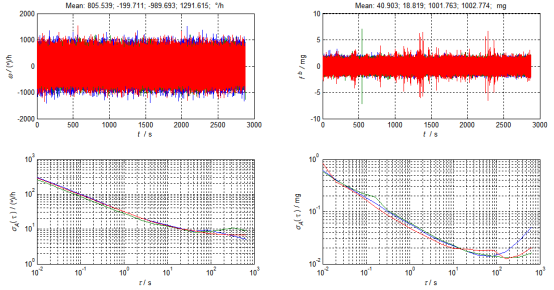
图4 后面静止段的Allan方差曲线
数据下载地址(感谢热心网友提供测试数据):
链接:https://pan.baidu.com/s/1nJnP9slB3EvJQwo0o9wFBA 提取码:ra51